§ 2. Пружинный и математический маятники
| Сайт: | Профильное обучение |
| Курс: | Физика. 11 класс |
| Книга: | § 2. Пружинный и математический маятники |
| Напечатано:: | Гость |
| Дата: | Wednesday, 8 July 2026, 01:01 |
|
Груз, подвешенный на нити, колеблющийся в поле тяжести Земли, а также груз, прикрепленный к пружине — примеры наиболее простых механических колебательных систем. Рассмотрим физические процессы, происходящие в таких системах. |
Совокупность нескольких тел образуют механическую систему. Тела, не входящие в систему, называются внешними.
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое телом под действием приложенных к нему сил, обратно пропорционально массе тела, направлено по результирующей этих сил и прямо пропорционально ее модулю:

Закон Гука: при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%40font-face%7Bfont-family%3A'brack_sm47dfc8ff4929ef7202a7f1c'%3Bsrc%3Aurl(data%3Afont%2Ftruetype%3Bcharset%3Dutf-8%3Bbase64%2CAAEAAAAMAIAAAwBAT1MvMi7PH4UAAADMAAAATmNtYXA3kjw6AAABHAAAADRjdnQgAQYDiAAAAVAAAAASZ2x5ZkyYQ7YAAAFkAAAAWWhlYWQLyR8fAAABwAAAADZoaGVhAq0XCAAAAfgAAAAkaG10eDEjA%2FUAAAIcAAAACGxvY2EAAEKZAAACJAAAAAxtYXhwBJsEcQAAAjAAAAAgbmFtZW7QvZAAAAJQAAAB5XBvc3QArQBVAAAEOAAAACBwcmVwu5WEAAAABFgAAAAHAAACDAGQAAUAAAQABAAAAAAABAAEAAAAAAAAAQEAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAACAgICAAAAAg9AMD%2FP%2F8AAABVAABAAAAAAACAAEAAQAAABQAAwABAAAAFAAEACAAAAAEAAQAAQAA9AL%2F%2FwAA9AL%2F%2Fwv%2FAAEAAAAAAAABVABUAQAAKwCMAIAAqAAHAAAAAgAAAAAA1QEBAAMABwAAMTMRIxcjNTPV1auAgAEB1qsAAQBQAAAAoAFUAAMAHxgBsAMvsAA8sQIC9bABPACxAwA%2FsAI8fLEABvWwATwTMxEjUFBQAVT%2BrAAAAAABAAAAAQAAix6x7F8PPPUAAwQA%2F%2F%2F%2F%2F9Wt7mT%2F%2F%2F%2F%2F1a3uZP%2BA%2F%2F8B1gFYAAAACgACAAEAAAAAAAEAAAFU%2F%2F8AABdw%2F4D%2FgAHWAAEAAAAAAAAAAAAAAAAAAAACANUAAADwAFAAAAAAAAAAIQAAAFkAAQAAAAIACgACAAAAAAACAIAEAAAAAAAEAABlAAAAAAAAABUBAgAAAAAAAAABACYAAAAAAAAAAAACAA4AJgAAAAAAAAADAEQANAAAAAAAAAAEACYAeAAAAAAAAAAFABYAngAAAAAAAAAGABMAtAAAAAAAAAAIABwAxwABAAAAAAABACYAAAABAAAAAAACAA4AJgABAAAAAAADAEQANAABAAAAAAAEACYAeAABAAAAAAAFABYAngABAAAAAAAGABMAtAABAAAAAAAIABwAxwADAAEECQABACYAAAADAAEECQACAA4AJgADAAEECQADAEQANAADAAEECQAEACYAeAADAAEECQAFABYAngADAAEECQAGABMAtAADAAEECQAIABwAxwBCAHIAYQBjAGsAZQB0AHMAIABzAG0AYQBsAGwAIABzAGkAegBlAFIAZQBnAHUAbABhAHIATQBhAHQAaABzACAARgBvAHIAIABNAG8AcgBlACAAQgByAGEAYwBrAGUAdABzACAAcwBtAGEAbABsACAAcwBpAHoAZQBCAHIAYQBjAGsAZQB0AHMAIABzAG0AYQBsAGwAIABzAGkAegBlAFYAZQByAHMAaQBvAG4AIAAyAC4AMEJyYWNrZXRzX3NtYWxsX3NpemUATQBhAHQAaABzACAARgBvAHIAIABNAG8AcgBlAAAAAAMAAAAAAAAAqgBVAAAAAAAAAAAAAAAAAAAAAAAAAAC5B%2F8AAo2FAA%3D%3D)format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EF%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2213%22%20text-anchor%3D%22middle%22%20x%3D%2221.5%22%20y%3D%2224%22%3E%26%23x443%3B%26%23x43F%3B%26%23x440%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math196650bafcbad352c1b3bb8d293%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2252.5%22%20y%3D%2216%22%3Ek%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%2259.5%22%20y%3D%228%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%2259.5%22%20y%3D%2214%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%2259.5%22%20y%3D%2220%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%2259.5%22%20y%3D%2226%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22101.5%22%20y%3D%228%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22101.5%22%20y%3D%2214%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22101.5%22%20y%3D%2220%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22101.5%22%20y%3D%2226%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2266.5%22%20y%3D%2216%22%3El%3C%2Ftext%3E%3Ctext%20font-family%3D%22math196650bafcbad352c1b3bb8d293%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2278.5%22%20y%3D%2216%22%3E%26%23x2212%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2289.5%22%20y%3D%2216%22%3El%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2213%22%20text-anchor%3D%22middle%22%20x%3D%2296.5%22%20y%3D%2224%22%3E0%3C%2Ftext%3E%3Ctext%20font-family%3D%22math196650bafcbad352c1b3bb8d293%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22114.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22127.5%22%20y%3D%2216%22%3Ek%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22134.5%22%20y%3D%228%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22134.5%22%20y%3D%2214%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22134.5%22%20y%3D%2220%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22161.5%22%20y%3D%228%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22161.5%22%20y%3D%2214%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22brack_sm47dfc8ff4929ef7202a7f1c%22%20font-size%3D%2218%22%20text-anchor%3D%22start%22%20x%3D%22161.5%22%20y%3D%2220%22%3E%26%23xF402%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math196650bafcbad352c1b3bb8d293%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22146.5%22%20y%3D%2216%22%3E%26%23x2206%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22156.5%22%20y%3D%2216%22%3El%3C%2Ftext%3E%3C%2Fsvg%3E)
где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела. Направление силы упругости всегда противоположно направлению смещения при деформации.
— длина недеформированного тела, l — длина деформированного тела. Направление силы упругости всегда противоположно направлению смещения при деформации.
Какие условия необходимы для возникновения колебаний?
Результаты опытов показывают, что для возникновения и существования механических колебаний тело изначально необходимо привести в движение. Это можно сделать, отклоняя его от положения равновесия или придавая ему начальную скорость посредством толчка. Этим отклонением или толчком определяется амплитуда колебаний. Кроме того, при выведении тела из положения равновесия в колеблющейся системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия.
Простейшая колебательная система, состоящая из тела с прикрепленной к нему пружиной, связывающей тело и опору, называется пружинным маятником. Пружина может располагаться как горизонтально (горизонтальный пружинный маятник), так и вертикально (вертикальный пружинный маятник).
Рассмотрим колебания горизонтального пружинного маятника.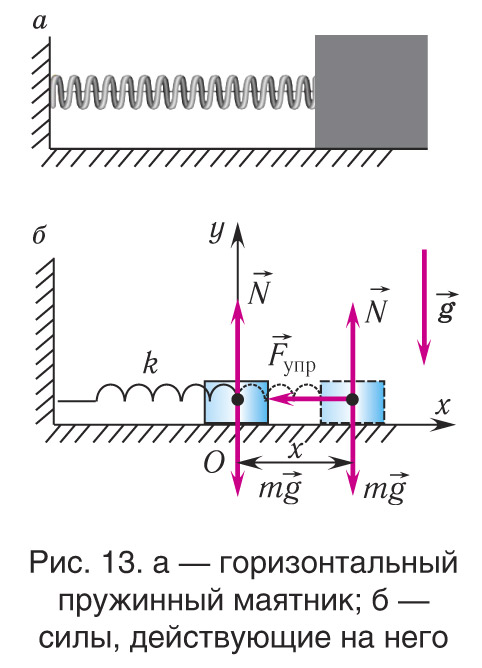
Пусть тело массой m, лежащее на гладкой горизонтальной поверхности, прикреплено к свободному концу невесомой пружины жесткостью k (рис. 13, а). Второй конец пружины прикреплен к неподвижной опоре. Выведем тело из положения равновесия, сместив его, например, вправо на расстояние x (см. рис. 13, б). При этом согласно закону Гука возникнет сила упругости format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22math12bba9f4124283edd644799e0ce%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%226.5%22%20y%3D%228%22%3E%26%23x2192%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2220%22%3EF%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2213%22%20text-anchor%3D%22middle%22%20x%3D%2222.5%22%20y%3D%2228%22%3E%26%23x443%3B%26%23x43F%3B%26%23x440%3B%3C%2Ftext%3E%3C%2Fsvg%3E) приложенная к телу и направленная влево.
приложенная к телу и направленная влево.
Согласно второму закону Ньютона будет выполняться равенство:
|
|
(1) |

С учетом закона Гука из (1) получаем уравнение для проекций величин на ось Ox (см. рис. 13, б):
|
(2) |
 .
.Согласно (2) ускорение тела массой m пропорционально действующей силе и направлено к положению равновесия. При этом возникают колебания тела. Каждые полпериода направление движения меняется на противоположное. Смещение груза происходит то вправо, то влево относительно положения равновесия, т. е. оно меняет знак. Следовательно, и сила согласно (2) тоже меняет знак.
Перепишем полученное соотношение (2) в виде:
|
(3) |
Уравнение (3) называется уравнением гармонических колебаний пружинного маятника.
Следовательно, необходимым условием возникновения гармонических колебаний является действие возвращающей силы, направленной к положению равновесия и прямо пропорциональной смещению тела от положения равновесия. Эта возвращающая сила всегда направлена к положению равновесия, о чем «говорит» минус в уравнении (2).
В положении равновесия возвращающая сила равна нулю ( = 0), так как x = 0. Поэтому если в этом положении колеблющееся тело остановить, то колебания исчезнут.
= 0), так как x = 0. Поэтому если в этом положении колеблющееся тело остановить, то колебания исчезнут.
Расчеты показывают, а результаты экспериментов подтверждают, что при описанных условиях тело будет совершать колебания с периодом:
|
(4) |
 .
.С учетом того, что период связан с циклической частотой соотношением  , находим:
, находим:
 . . |
(5) |
Из формул (4) и (5) следует, что период и частота гармонических колебаний пружинного маятника определяются массой груза m и жесткостью пружины k и не зависят от амплитуды его колебаний.
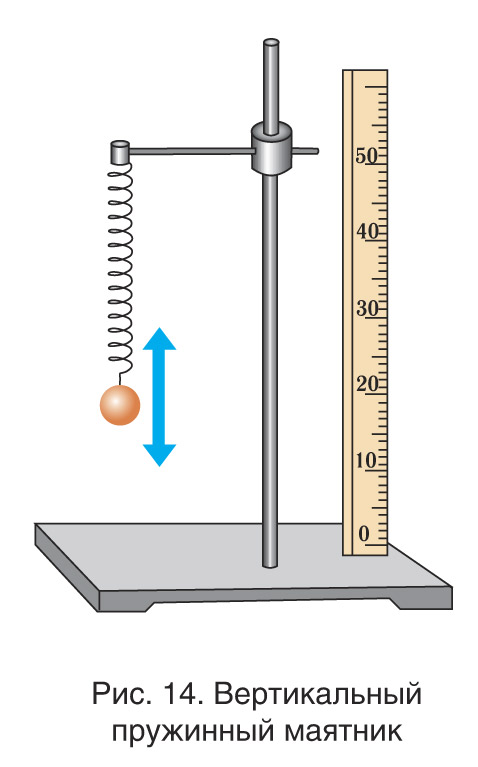
Отметим, что период и циклическая частота колебаний вертикального пружинного маятника (рис. 14) также определяются по формулам (4) и (5).
Одной из наиболее распространенных колебательных систем является математический маятник.
Математическим маятником называется небольшое тело массой m, подвешенное на невесомой нерастяжимой нити длиной l, находящееся в поле силы тяжести (рис. 15).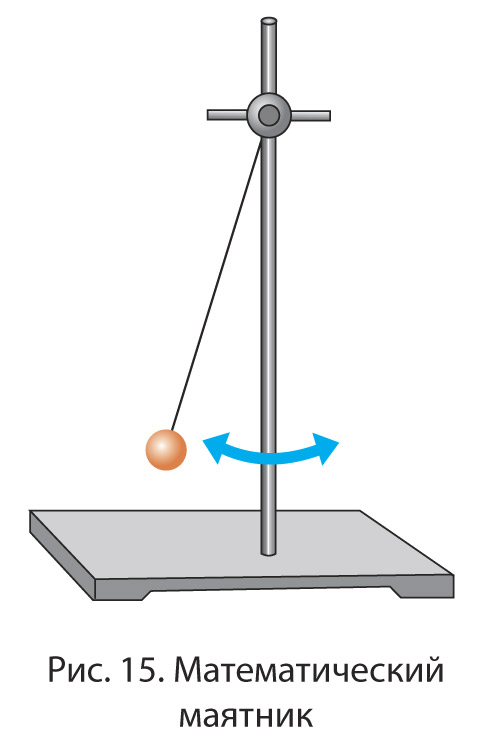
Рассмотрим колебания математического маятника.
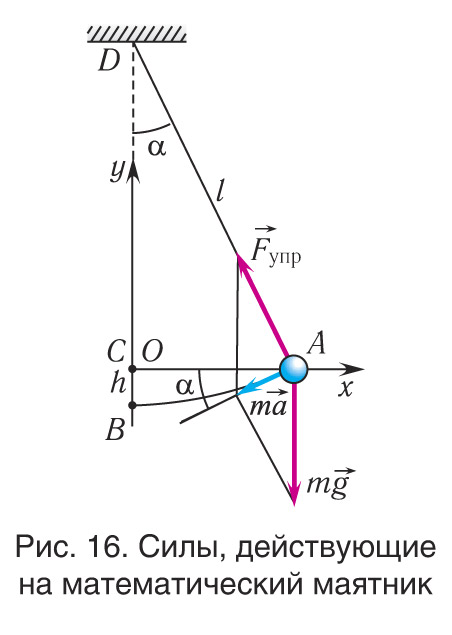
Отклонение маятника от положения равновесия будем характеризовать углом α (рис. 16), который нить образует с вертикалью. После отклонения маятника от положения равновесия на него действуют две силы: направленная вертикально вниз сила тяжести format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%226.5%22%20y%3D%2217%22%3Em%3C%2Ftext%3E%3Ctext%20font-family%3D%22math12bba9f4124283edd644799e0ce%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%229%22%3E%26%23x2192%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2219.5%22%20y%3D%2217%22%3Eg%3C%2Ftext%3E%3C%2Fsvg%3E) и направленная вдоль нити сила упругости
и направленная вдоль нити сила упругости  . Под действием этих сил тело движется ускоренно к положению равновесия (точка B). Пройдя точку B, тело продолжает двигаться, но его скорость постепенно уменьшается, обращаясь в нуль в точке, симметричной точке А относительно вертикали. После этого оно начинает двигаться обратно к точке B.
. Под действием этих сил тело движется ускоренно к положению равновесия (точка B). Пройдя точку B, тело продолжает двигаться, но его скорость постепенно уменьшается, обращаясь в нуль в точке, симметричной точке А относительно вертикали. После этого оно начинает двигаться обратно к точке B.
Согласно второму закону Ньютона для движения маятника можем записать:
 |
(6) |
В проекциях на выбранные оси координат Ox и Oy (см. рис. 16) получаем:
 , , |
(7) |
 |
(8) |
Поскольку при малых углах отклонения длина дуги АВ ≈ х, то из ΔAOD находим:
 ,
,
где х — отклонение маятника от положения равновесия, l — длина маятника. Подставляя выражение для синуса в (7), получим:
 |
(9) |
Таким образом, силой, возвращающей маятник к устойчивому положению равновесия при колебаниях, являются силы упругости его нити и силы тяжести.
При малых углах отклонения маятника проекция вектора ускорения  и ей можно пренебречь, а
и ей можно пренебречь, а format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2212.5%22%20y%3D%2216%22%3Ecos%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2233.5%22%20y%3D%2216%22%3E%26%23x3B1%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e551d3ddbf87bddac369765bd5%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2251.5%22%20y%3D%2216%22%3E%26%23x2248%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2264.5%22%20y%3D%2216%22%3E1%3C%2Ftext%3E%3C%2Fsvg%3E) , тогда из уравнения (8) следует
, тогда из уравнения (8) следует format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EF%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2221%22%3E%26%23x443%3B%26%23x43F%3B%26%23x440%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1090bbcd195f72d54aca7fb5580%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2242.5%22%20y%3D%2216%22%3E%26%23x2248%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2257.5%22%20y%3D%2216%22%3Em%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2268.5%22%20y%3D%2216%22%3Eg%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1090bbcd195f72d54aca7fb5580%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2276.5%22%20y%3D%2216%22%3E.%3C%2Ftext%3E%3C%2Fsvg%3E) Следовательно, уравнение движения маятника вдоль оси Ox запишется в виде:
Следовательно, уравнение движения маятника вдоль оси Ox запишется в виде:
 . . |
где format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22ae2ef524fbf3d9fe611d5a8e90fefdc%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2214%22%3Ea%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2219%22%3Ex%3C%2Ftext%3E%3C%2Fsvg%3E) — проекция ускорения, сообщаемого грузу маятника силой упругости нити.
— проекция ускорения, сообщаемого грузу маятника силой упругости нити.
Откуда получаем уравнение колебаний математического маятника:
|
(10) |
 .
.Сравнивая соотношения (10), (3) и (5), легко получить формулу для циклической частоты математического маятника в поле тяжести Земли:
 . . |
(11) |
Период малых колебаний математического маятника в поле тяжести Земли определяется по формуле Гюйгенса:
|
(12) |
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2234%22%3ET%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1d10334359dc676e2e7e0aee524%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2234%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2231.5%22%20x2%3D%2256.5%22%20y1%3D%2227.5%22%20y2%3D%2227.5%22%2F%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20text-anchor%3D%22middle%22%20x%3D%2237.5%22%20y%3D%2220%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1d10334359dc676e2e7e0aee524%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2248.5%22%20y%3D%2220%22%3E%26%23x3C0%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2244.5%22%20y%3D%2245%22%3E%26%23x3C9%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1d10334359dc676e2e7e0aee524%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2267.5%22%20y%3D%2234%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20text-anchor%3D%22middle%22%20x%3D%2280.5%22%20y%3D%2234%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1d10334359dc676e2e7e0aee524%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2291.5%22%20y%3D%2234%22%3E%26%23x3C0%3B%3C%2Ftext%3E%3Cpolyline%20fill%3D%22none%22%20points%3D%2214%2C-45%2013%2C-45%206%2C0%202%2C-18%22%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20transform%3D%22translate(98.5%2C48.5)%22%2F%3E%3Cpolyline%20fill%3D%22none%22%20points%3D%226%2C0%202%2C-18%201%2C-16%22%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20transform%3D%22translate(98.5%2C48.5)%22%2F%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%22112.5%22%20x2%3D%22138.5%22%20y1%3D%223.5%22%20y2%3D%223.5%22%2F%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%22116.5%22%20x2%3D%22129.5%22%20y1%3D%2227.5%22%20y2%3D%2227.5%22%2F%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22122.5%22%20y%3D%2220%22%3El%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22122.5%22%20y%3D%2245%22%3Eg%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1d10334359dc676e2e7e0aee524%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22134.5%22%20y%3D%2234%22%3E.%3C%2Ftext%3E%3C%2Fsvg%3E)
Используя соотношения (5) и (11), уравнение колебаний пружинного маятника  и математического маятника
и математического маятника format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2230%22%3E%26%23x3B1%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2213%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2238%22%3Ex%3C%2Ftext%3E%3Ctext%20font-family%3D%22math12ed72e0d2d50af08c235c494fe%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2226.5%22%20y%3D%2230%22%3E%2B%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2237.5%22%20x2%3D%2252.5%22%20y1%3D%2223.5%22%20y2%3D%2223.5%22%2F%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2244.5%22%20y%3D%2216%22%3Eg%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2244.5%22%20y%3D%2241%22%3EL%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2259.5%22%20y%3D%2230%22%3Ex%3C%2Ftext%3E%3Ctext%20font-family%3D%22math12ed72e0d2d50af08c235c494fe%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2230%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Times%20New%20Roman%22%20font-size%3D%2218%22%20text-anchor%3D%22middle%22%20x%3D%2286.5%22%20y%3D%2230%22%3E0%3C%2Ftext%3E%3C%2Fsvg%3E) можно записать в одинаковом виде:
можно записать в одинаковом виде:
|
(13) |
 .
.Таким образом, зависимости координат от времени x(t), описываемые уравнениями (5) и (6) из § 1, удовлетворяют уравнению (13), которое называется уравнением гармонических колебаний.
Как видно из формул (11), (12), период и циклическая частота малых колебаний математического маятника не зависят от массы маятника и амплитуды его колебаний, а определяются только его длиной и ускорением свободного падения.
Галилео Галилей первый экспериментально определил, что период малых колебаний ( ) математического маятника длиной l в поле силы тяжести не зависит от его массы m и амплитуды колебаний (угла начального отклонения a).
) математического маятника длиной l в поле силы тяжести не зависит от его массы m и амплитуды колебаний (угла начального отклонения a).
  |
Одним из важнейших достижений Х. Гюйгенса было изобретение часов с маятником. Он запатентовал свое изобретение 16 июля 1657 г. В 1673 г. вышло в свет его сочинение «Маятниковые часы», в котором были изложены теоретические основы его изобретения. Именно постоянство периода (частоты) колебаний маятника позволило использовать его для создания часов.
Если маятник приобретает дополнительное ускорение  , обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
, обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:

где  — «эффективное ускорение», равное векторной разности
— «эффективное ускорение», равное векторной разности  .
.
Повышенный интерес к гармоническим колебаниям объясняется тем, что они широко распространены в науке и технике (маятники, музыкальные инструменты, свет, переменные токи и т. д.). Кроме того, гармонические колебания имеют простое математическое описание, а их период не зависит от амплитуды. Подчеркнем, что любое периодическое движение можно рассматривать как результат наложения простых гармонических составляющих.
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов εσος (изос) — равный и χρονος (хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности. Изохронность колебаний маятника была открыта Галилео Галилеем в
|
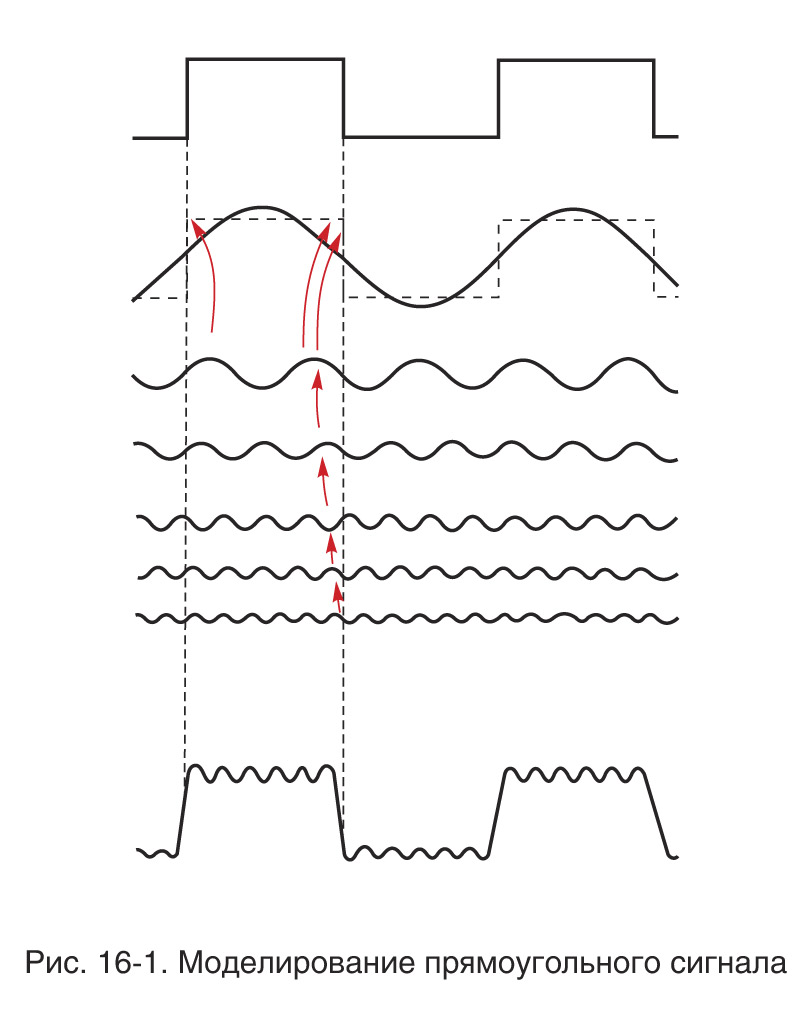
В 1807 г. французский физик Жан Батист Жозеф Фурье (1768—1830) показал, что любой периодический процесс, каким бы сложным он ни был, может быть разложен на составляющие его гармонические сигналы. В качестве примера приведем моделирование прямоугольного сигнала в виде суммы гармонических сигналов с кратными частотами в отношении 1:3:5:7…. (рис. 16-1). Чем больше сигналов разных частот складываются, тем точнее форма конечного сигнала будет соответствовать исходной прямоугольного сигнала. Сигналы прямоугольной формы широко используются для проверки динамиков, микрофонов. |
 |
Вопросы к параграфу
1. Какой маятник называют пружинным? Запишите кинематический закон движения пружинного маятника.
2. По какой формуле определяется циклическая частота колебаний пружинного маятника? Период его колебаний?
3. Изменится ли период колебаний пружинного маятника, если его «перенести» с поверхности Земли на поверхность Луны? Привести в состояние невесомости?
4. Какой маятник называют математическим? Запишите кинематический закон движения математического маятника.
5. Как направлена равнодействующая сил, приложенных к грузу маятника, в моменты, когда он находится в крайних положениях? Когда проходит через положение равновесия?
6. Маятниковые часы спешат. Как надо изменить длину подвеса, чтобы они шли точно?
7. Каким образом, используя математический маятник, можно определить ускорение свободного падения в данном месте?
8. Влияет ли изменение температуры на точность хода маятниковых часов?
Примеры решения задач

1. Определите циклическую частоту  и период T колебаний тела, массой m = 500 г, прикрепленного к вертикальной пружине (рис. 17). Известно, что в состоянии покоя тело растягивает пружину на расстояние х0 = 10 мм и для возбуждения колебаний его смещают вниз на расстояние х = 30 мм и отпускают.
и период T колебаний тела, массой m = 500 г, прикрепленного к вертикальной пружине (рис. 17). Известно, что в состоянии покоя тело растягивает пружину на расстояние х0 = 10 мм и для возбуждения колебаний его смещают вниз на расстояние х = 30 мм и отпускают.
m = 500 г = 0,500 кг
х = 30 мм = 3,0 · 10−2 м
х0 = 10 мм = 1,0 · 10−2 м
- ?, T - ?Найдем жесткость k пружины. Из условия равновесия тела следует:
 . . |
По закону Гука в проекции на ось Ох имеем:
 . . |
Тогда в проекции на ось Ox условие равновесия запишется:
 . . |
Отсюда для циклической частоты получаем:
 . . |
Период колебаний находим из соотношения:
 . . |
Ответ:  .
.
2. Выведите формулу для периода T колебаний вертикального пружинного маятника, если масса груза m и жесткость пружины k.
Решение
Рассмотрим вертикальное движение груза, происходящее под действием силы упругости пружины и силы тяжести груза после толчка (рис. 17-1). Начало координат поместим в точку, соответствующую равновесному положению тела (рис. 17-2). В этом положении пружина растянута на величину  , определяемую соотношением:
, определяемую соотношением:
 . . |
(1) |
 |
 |
При смещении груза на величину x из положения равновесия сила, действующая со стороны пружины на груз, равна  .
.
Тогда по второму закону Ньютона 
С учетом соотношения (1) это уравнение перепишем в виде:
 . . |
Если ввести обозначение  , то уравнение движения груза запишется в виде:
, то уравнение движения груза запишется в виде:
 . . |
Оно описывает гармонические колебания вертикального пружинного маятника с частотой такой же, как у горизонтального пружинного маятника. Следовательно, период колебаний вертикального пружинного маятника определяется по такой же формуле, как и горизонтального. Это подтверждается и записью осциллограммы колебаний вертикального пружинного маятника (рис. 17-1):
 . . |
Ответ: . Таким образом, действующая в колебательной системе постоянная сила только смещает положения равновесия, но не изменяет частоту колебаний.
Упражнение 2
1. Определите период Т и частоту  колебаний груза массой m = 200 г, подвешенного на пружине жесткостью
колебаний груза массой m = 200 г, подвешенного на пружине жесткостью 
2. Определите длину l математического маятника вблизи поверхности Земли, если частота его колебаний = 1,0 Гц.
3. Определите жесткость k пружины маятника массой m = 400 г, совершающего колебания, представленные на рисунке 18.
4. Груз, подвешенный к пружине, вызывает ее удлинение на величину Δl. Определите Δl пружины, если циклическая частота вертикальных колебаний такой системы 
5. Два тела с одинаковыми массами подвешены к двум одинаковым пружинам. Тела смещают вниз: одно на расстояние x1 = 10 см, другое — на расстояние х2 = 20 см от положения равновесия, затем одновременно отпускают. Какое из них первым пройдет положение равновесия?
6. Один математический маятник совершил за некоторое время N1= 20 колебаний, а второй за то же время совершил N2 = 16 колебаний. Определите длину l2 второго маятника, если известно, что разность длин маятников Δl = 10 см.
7. Период малых колебаний математического маятника на поверхности Земли равен Т = 0,80 с. Каким будет период Т1 его колебаний на поверхности Марса, если ускорение свободного падения gм = 0,37g3?
8. Определите длину l секундного маятника, установленного в Минске, где ускорение свободного падения  . Найдите относительную погрешность расчета, в котором ускорение свободного падения было бы принято равным
. Найдите относительную погрешность расчета, в котором ускорение свободного падения было бы принято равным 

9.* Определите длину l математического маятника, совершающего колебания, представленные на рисунке 18-1.
10.* На пружине колеблется груз с частотой = 0,620 Гц. Когда к нему прикрепили дополнительный груз массой  , частота колебаний стала 1 = 480 Гц . Найдите массу m начального груза
, частота колебаний стала 1 = 480 Гц . Найдите массу m начального груза
11.* Тело массой m подвешено на пружине жесткостью k. Пружину разрезали пополам и прикрепили к ее одной половине то же тело. Во сколько раз n изменилась частота колебаний этого тела?
12.* Две невесомые пружины жесткостями  и
и  соединены один раз последовательно, другой — параллельно. Во сколько раз n будут отличаться периоды колебаний груза на таких пружинах?
соединены один раз последовательно, другой — параллельно. Во сколько раз n будут отличаться периоды колебаний груза на таких пружинах?